项目概述:双传感器协同的高精度测距与避障视觉模组
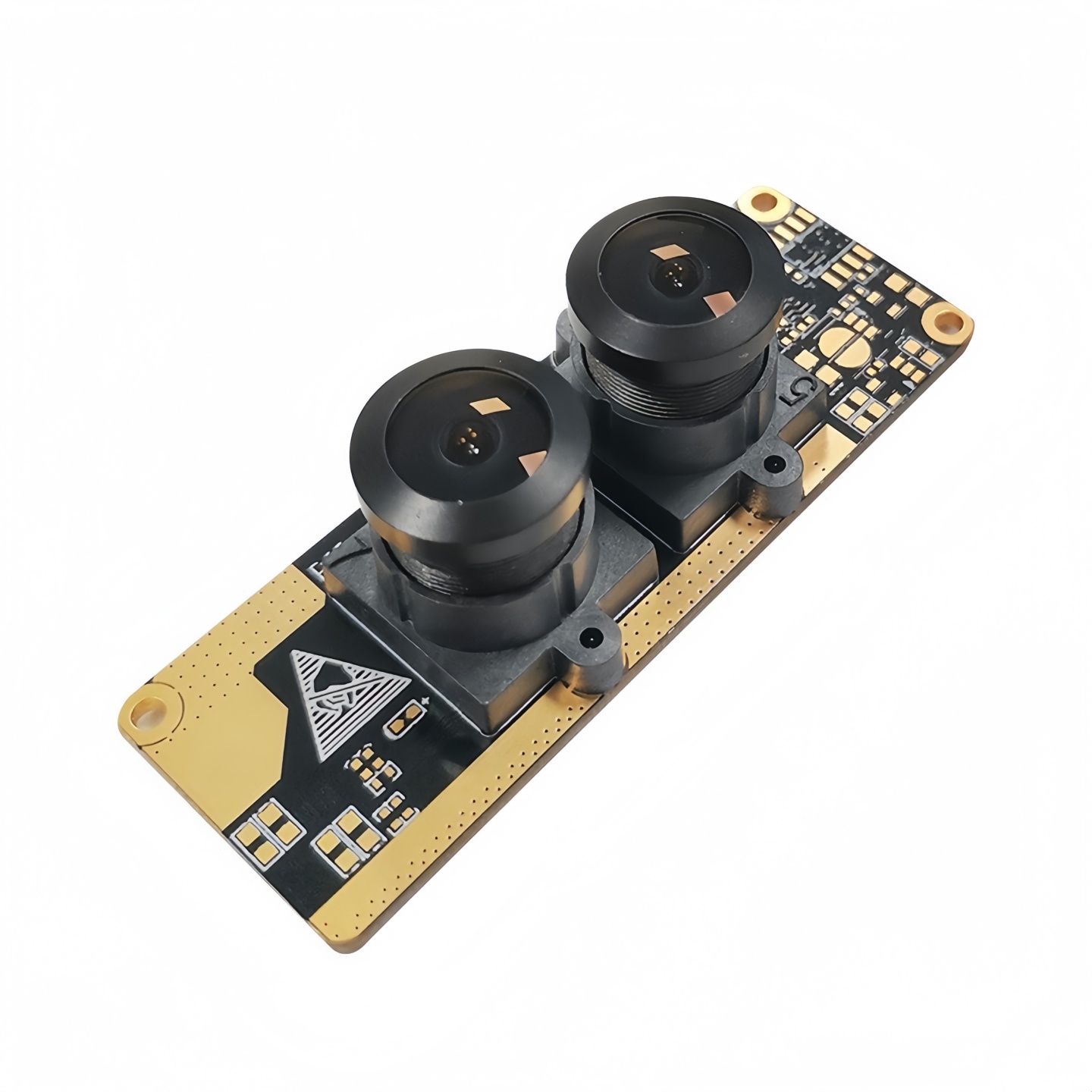
本项目为机器人、无人机设备商定制开发的高性能双目摄像头模组,采用索尼IMX307与豪威OV2710双传感器协同架构。模组创新性地融合USB 2.0 UVC免驱与MIPI CSI-2双输出接口,支持200万像素(1920×1080)高清成像与双目帧同步采集(同步精度<1ms)。通过主动立体视觉原理与定制测距算法,可实现0.1m-10m范围内的实时深度感知(精度±1%),为AI避障、三维建模、SLAM建图等应用提供高性价比、开箱即用的双目视觉解决方案。
核心技术方案:双传感器与双接口的协同设计

定制化设计亮点:
自适应测距算法:内置算法可根据场景特征(纹理丰富度、光照条件)自动调整匹配策略,在纹理缺失区域(如白墙) 和光照剧烈变化环境下,仍能保持较高的测距稳定性和精度。
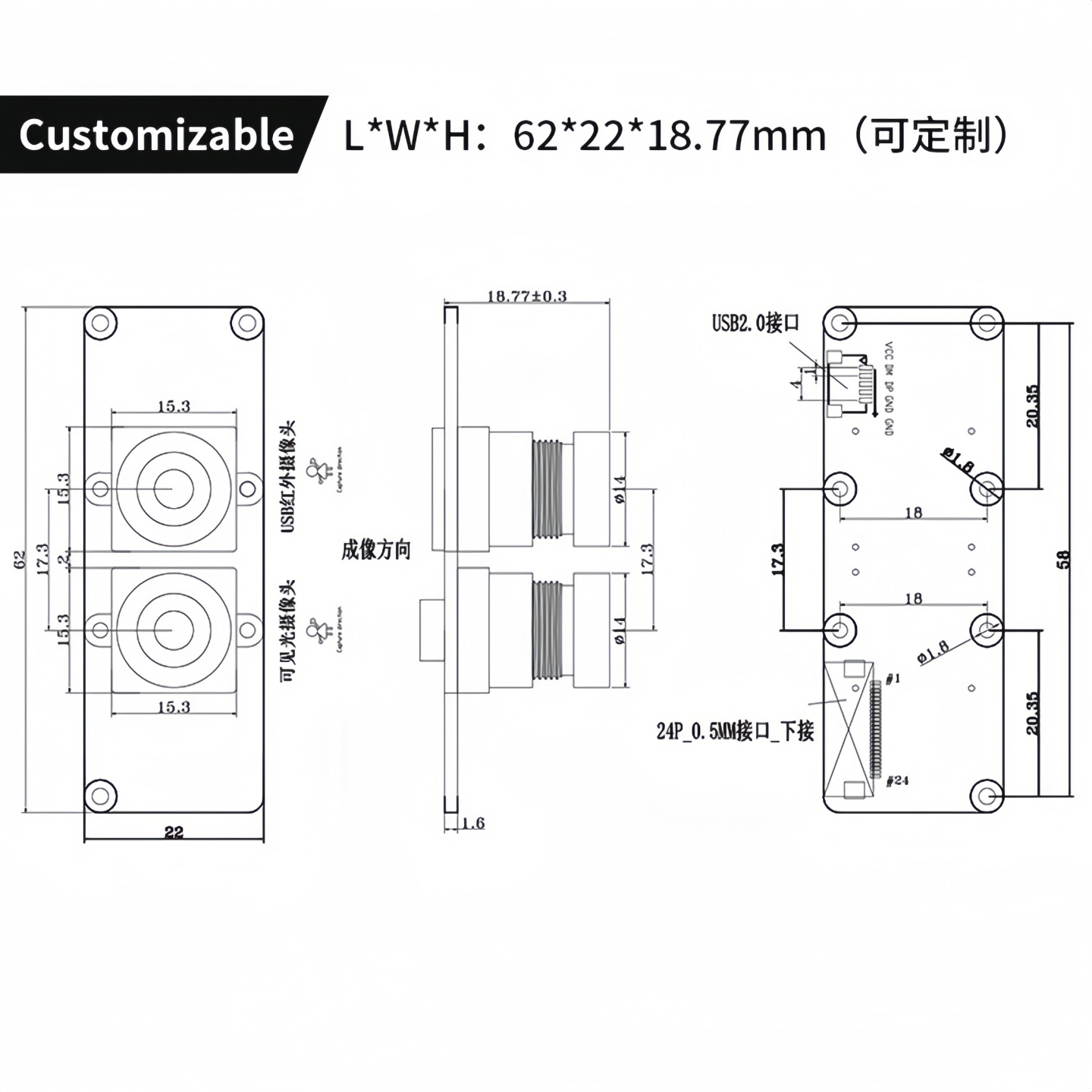
紧凑型结构设计:采用长方形PCB板(具体尺寸见尺寸图,也可根据客户需求定制),结构坚固,并精确校准双镜头的光轴平行度与基线距离,从硬件上保证立体视觉的精度。
灵活供电与低功耗:支持USB总线供电(5V/500mA),典型功耗<1.5W,适合电池供电的移动设备长时间作业。
典型应用场景解析
无人机自主避障系统:
需求:小型无人机需要在复杂户外环境(光线变化、多障碍物)中实现360°障碍物感知与自主避障。
解决方案:利用本模组作为前向视觉系统,通过实时输出深度图,识别前方5-10米范围内的电线、树枝等细小障碍物,为飞控系统提供避障决策依据。
价值:相比单一红外或超声波方案,视觉方案能更好地识别障碍物材质和具体形状,避障策略更智能。
AGV/AMR底盘避障与导航:
需求:工业AGV在仓库运行时,需检测低矮障碍物(如掉落的货品)、托盘叉脚,并实现沿边导航。
解决方案:将模组斜向下安装于车体前端,通过深度图感知地面障碍物和货架边缘,实现安全避障与精准停靠。
价值:提供丰富的环境三维信息,支持更复杂的导航逻辑,提升自动化流程的智能化和安全性。
三维扫描与体积测量:
需求:物流行业需要快速测量包裹的体积(长宽高),用于自动分拣和费用计算。
解决方案:模组固定于传送带上方,对经过的包裹进行快速三维点云重建,实时输出尺寸数据。
价值:非接触式测量,效率高,且成本远低于大型激光扫描仪。
定制支持与集成指南
我们为开发者提供灵活的技术支持,助力项目快速落地:
硬件定制选项:支持PCB尺寸与形状、镜头基线距离(影响测距精度与最近距离)、接口类型(可定制为纯USB或纯MIPI版本)的定制。
软件与算法支持:提供开源SDK(支持OpenCV、ROS),包含相机标定、深度计算、点云生成等核心功能的示例代码,方便用户二次开发和算法移植。
校准服务:可提供出厂双目标定服务,并附赠高精度参数文件,用户集成后无需复杂标定即可获得准确深度信息。
优势总结
功能强大:兼具高清成像与高精度实时测距能力,一机多用。
集成简便:USB免驱特性便于快速验证,MIPI接口满足嵌入式产品量产需求,提供极大的设计灵活性。
高性价比:基于成熟商用传感器,在保证性能的同时,有效控制硬件成本,适合消费级和工业级产品大规模应用。
开放生态:提供开放的SDK和算法支持,降低研发门槛,加速产品上市周期。
供应商。